Схема подключения реле ртк 1 3: Ртк 1 3ухл4 схема подключения
Ртк 1 3ухл4 схема подключения
Содержание
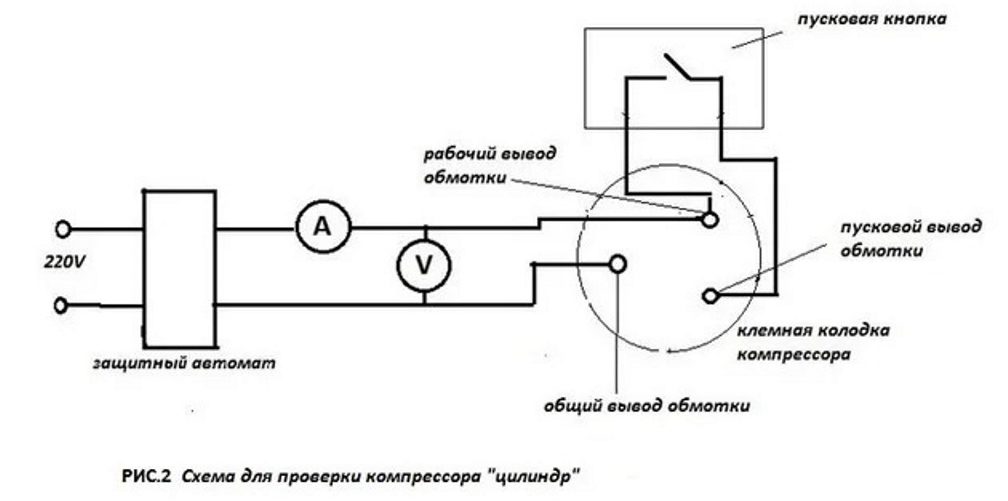
Для начала найдем парные вывода их должно быть две пары, как это сделать. Сейчас для этих целей множество приборов тестеры, омметры и т.п. Берем любой вывод обмотки и подключаем к нему любой из двух щупов прибора, а вторым щупом ищем ему пару.
Если прибор показал вам какое-то значение, например сопротивление 11 Ом то это и есть второй вывод обмотки, запишем показания прибора, отмечаем пару.
Следовательно, оставшиеся два вывода будут второй парой, но нам необходимо определить какая из них пусковая и рабочая обмотка, делаем замер, прибор показал 30 Ом.
Теперь ясно, где пусковая и рабочая обмотка, у пусковой обмотки сопротивление должно быть больше, чем у рабочей обмотки.
На рисунке изображено:
ОВ – рабочая, обмотка возбуждения, основного вращающего магнитного поля.
ПО – пусковая обмотка необходима для создания начального крутящегося момента в определенном направлении.
SB — кнопка для кратковременного включения пусковой обмотки к сети 220В.
Для того чтобы изменить направление вращение вала двигателя достаточно поменять вывода пусковой обмотки местами и направление при запуске изменится.
Во время экспериментов с двигателем не забудьте закрепить его, чтобы он во время пуска не ускакал и не собрал все провода в кучу.
Реле времени задает временной режим с выдержкой на отключение электродвигателя. Токовое реле служит для запуска двигателя, для кратковременного включения пусковой обмотки к сети 220В.
Реле выполнено в пластиковом корпусе, имеется три контактных вывода X1, X2, X3. На крышке показана правильная установка реле, большая стрелка с надписью “верх”, реле должно располагаться так чтобы стрелка всегда указывала вверх.
Для чего это необходимо, вы поймете, если поспорите устройство и принцип работы реле.
Подключение реле:
Подаем напряжение 220В на вывод «Х3» токового реле, фазу или ноль без разницы, а второй сетевой провод 220В напрямую подключаем к рабочей обмотке двигателя.
Вывод «Х1» — «ОВ» подключается ко второму свободному выводу, рабочей обмотке. Вывод «Х2» — «ПО» подключается к выводу пусковой обмотке.
При запуске двигателя, пусковой ток больше, чем рабочий. При прохождении пускового тока через катушку — [2] токового реле в катушке наводится магнитное поле, которое втягивает [1] — подвижный стальной сердечник, он приподнимается и поднимает подвижный контакт — [3].
Замыкается электрическая цепочка, которая подключает пусковую обмотку электродвигателя. Двигатель запускается и развивает номинальные обороты.
Двигатель запускается и развивает номинальные обороты.
Поскольку двигатель вошел в рабочий режим ток в реле уменьшился, ослабло магнитное поле в катушке реле, которое удерживало стальной сердечник – [1] в верхнем положении. Сердечник под своим весом падает в низ и тянет за собой [3] — контакт, пусковая обмотка — ПО отключается от сети 220В.
Витки из нихрома — [4] выполняют тепловую защиту двигателя. При перегрузе, заклинивание или междувиткового замыкания обмоток двигателя, нихром разогревается и своим теплом подогревает [5] — биметаллическую пластину, она при нагревании деформируется, прогибается и размыкает контакт — [6], отключает двигатель от сети 220В на время остывания биметаллической пластинки.
После остывания пластины контакт снова замкнется, и реле будет пытаться снова включить двигатель.
На рисунке приведен пример, схема запуска двигателя от стиральной машины при помощи конденсатора.
Заключение, для полной уверенности, что все сделали правильно, внимательно проверяем монтаж собранной схемы и тестируем ее, включаем двигатель на 1 мин. отключаем от сети и проверяем нагрев двигателя.
Почему через минуту, для того, чтобы определить в каком именно месте начинает, греется двигатель в подшипниках или в статоре. Если подождать дольше, то тепло распределится по корпусу и будет не понятен очаг перегрева.
Если всё в норме включаем двигатель и проверяем нагрев корпуса каждые 5 мин. 15 мин на тестирования будет достаточно, тыльная сторона ладони должна терпеть, если не терпит, то температура около 50°С и выше.
Если двигатель греется возможные причины:
Изношены подшипники, что привело к уменьшению зазора между статором и ротором, ротор задевает статор.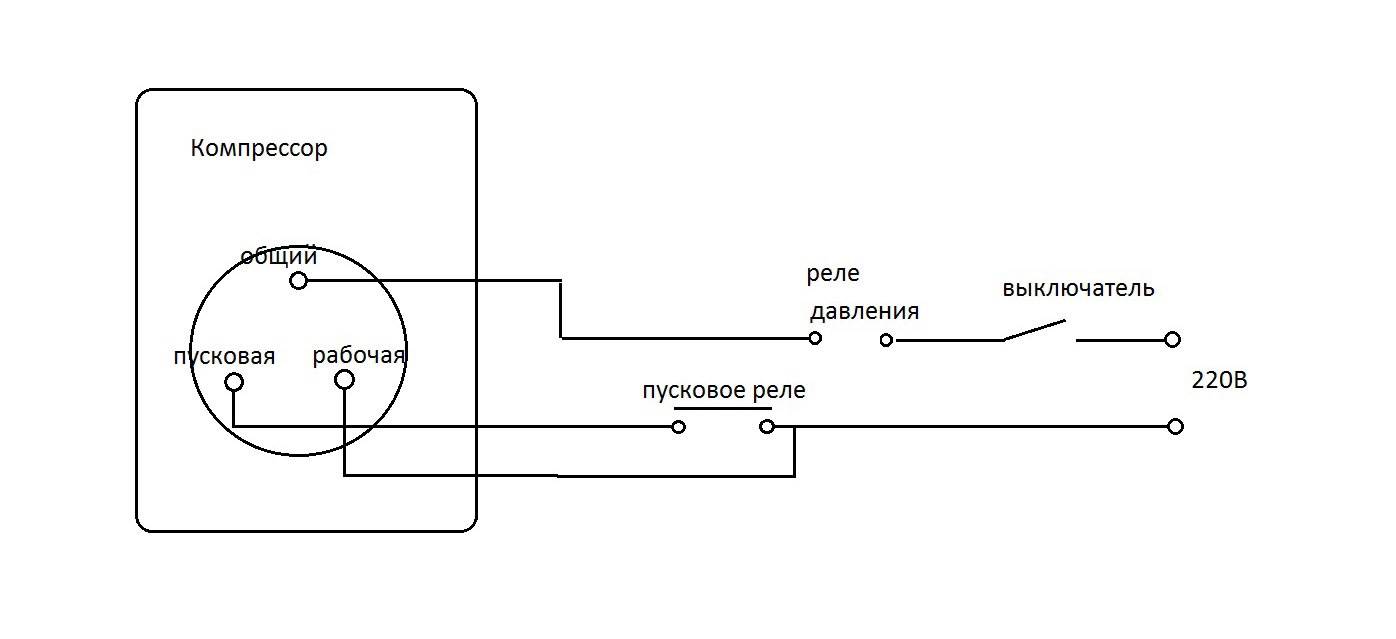
Подшипники забиты грязью или зажаты на перекос в подшипниковых крышках, что приводит к заклиниванию, тяжелому ходу вала.
Большая ёмкость конденсатора, необходимо уменьшить ёмкость конденсатора или запустить двигатель без конденсатора, раскрутив вал от руки. Если двигатель перестал, греется, значит, причина была в превышенной ёмкости конденсатора.
Если выше перечисленные причины были исключены, то в обмотках двигателя междувитковое замыкание.
Просмотр и ввод комментариев к статье
Как подключить двигатель от стиральной машины автомат
Куда можно подключить мотор от машинки автомат? Вариантов огромное количество, а самое главное то, что если есть данные о работе таких изделий и о правилах подключения, то вполне возможно собрать новые устройства, способные пригодиться в хозяйстве. Не стоит выкидывать стиралки до того, пока они не будут полностью разобраны, так как внутри может быть огромное количество полезных принадлежностей. К примеру, при поломке машинки марки Индезит можно получить двигатель мощностью в 430 Вт, способный развивать скорость до 11500 оборотов в минуту. Естественно, использовать его можно только при условии, что деталь полностью исправна и не станет причиной поломки новой техники. Идей того как можно использовать двигатель старой машинки существует неимоверное количество, причем даже стиралка малютка имеет свой движок способный принести пользу.
Естественно, использовать его можно только при условии, что деталь полностью исправна и не станет причиной поломки новой техники. Идей того как можно использовать двигатель старой машинки существует неимоверное количество, причем даже стиралка малютка имеет свой движок способный принести пользу.
Варианты:
- Наиболее простой вариант – это изготовление точильного станка, который позволит затачивать такие предметы как ножницы, ножи и тому подобные колющережущие предметы. Включается такой наждак только после того как мотор будет тщательно закреплен на поверхности прочного основания, а также установки вала на точильном камне или шлифовального круга. После сборки можно подсоединять оборудование к сети.
- Если ведется строительство, например, частного дома или заливание окружающей территории бетоном, то может потребоваться бетономешалка. Именно для нее можно использовать электродвигун. Переделать стиралку в бетономешалку не сложно, и для этого нужно еще отсоединить бак от стирального оборудования.

- Вибростолы с использованием такого мотора, позволят изготавливать шлакоблок, стоимость которого далеко не маленькая, а своими руками можно не плохо сэкономить.
- На участке много травы? Есть кролики, которым требуется трава? Регулярно проводится покос сена? Если правильно использовать моторчик, то он сможет стать отличным заменителем триммера и позволит убирать траву быстро, просто и не потратив на это много средств. Этот аппарат считается просто необходимым тем, кто проживает за пределами города и особенно для тех, кто любит заниматься сельским хозяйством.

Это лишь минимальный список того, что можно сделать, если использовать деталь от стиралки в виде электродвигателя. Могут потребоваться различные насадки, дополнительные емкости или же вовсе вспомогательные детали, но если иметь идею, то создать новое оборудование получится быстро и без вложений.
Схема подключения электродвигателя стиральной машины
Чтобы переделка стиральной машины в новое оборудование с использованием такой детали как электромотор была качественной и принесла результат, нужно обратить внимание на советы специалистов относительно того, как будет проводиться схема подключения.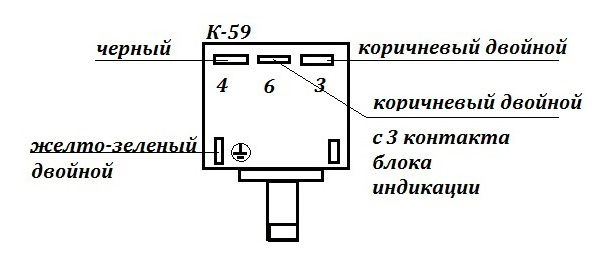
Особенность подключения движка проводится:
- Посредством использования такой комплектующей как конденсатор, подсоединить который нужно максимально правильно;
- С отсутствием пусковой обмотки.
Перед тем как будет осуществлено подключение, желательно разобрать провода по цветам. Такая группировка позволит провести подсоединение без ошибки.
На раздаточном коробе присутствуют 3 вида проводов:
- Белые два проводка – это подключение тахогенератора, которые не нужны.
- Коричневый и красный провод идут на обмотку статора и ротора.
- Серые и зеленые нужны для подсоединения к графитовым щеткам.
В зависимости от модели двигателя, например, от стиралки Сибирь выпущенной в СССР или Индезит могут отличаться и сами провода, и их количество, однако подключение должно быть исключительно точным.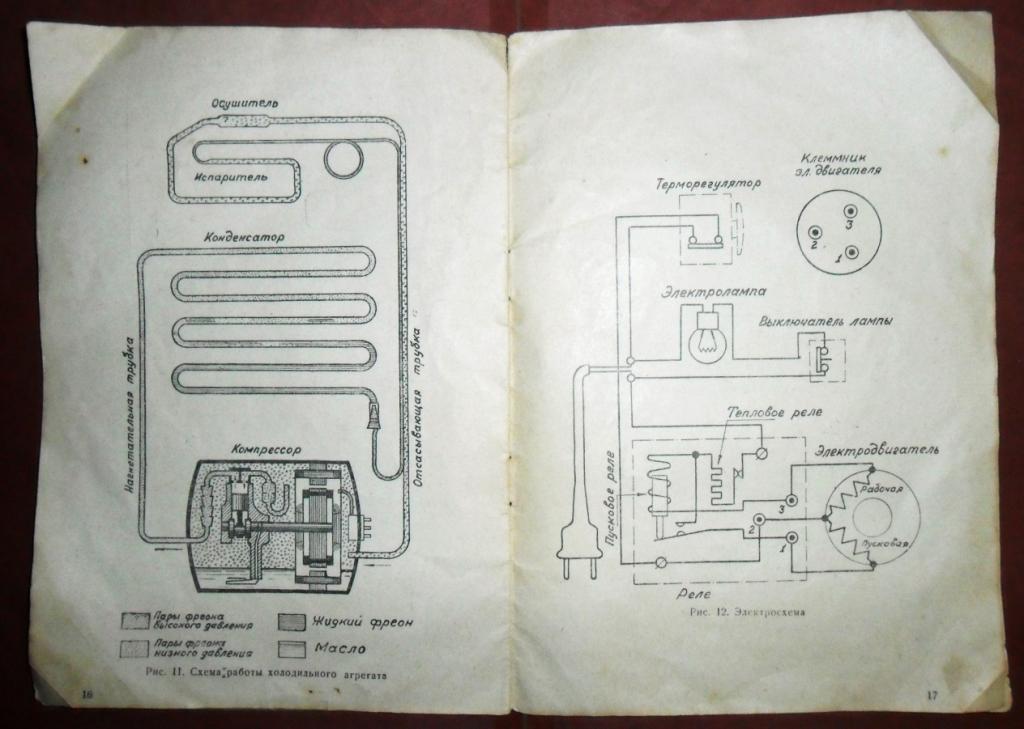 Чтобы обнаружить неработающие провода, достаточно их прозвонить при помощи мультиметра. У того, который выходит на тахогенератор присутствует сопротивление в 60-70 Ом. Эти кабеля изолируются и отводятся в сторону.
Чтобы обнаружить неработающие провода, достаточно их прозвонить при помощи мультиметра. У того, который выходит на тахогенератор присутствует сопротивление в 60-70 Ом. Эти кабеля изолируются и отводятся в сторону.
Двигатель от стиральной машинки: подключение к 220
Двигатель стиралки – это устройство, которое имеет: определенные характеристики, отличную мощность, четыре вывода для включения, возможность работать только от сети, большие обороты вращения в зависимости от модели, регулятор мощности функционирования. Электросхема требует подключения обмотки статора со щеткой ротора.
Для этого формируется перемычка и изолирования посредством специальной ленты.
Далее остаются провода от обмотки ротора и второй щетки. Они должны быть подсоединены к домашней сети напряжения. Если подключить двигатель к сети в 220 Вольт, то вращение начнется автоматически, что может привести к травме, а предотвратить это возможно за счет монтажа на любой поверхности.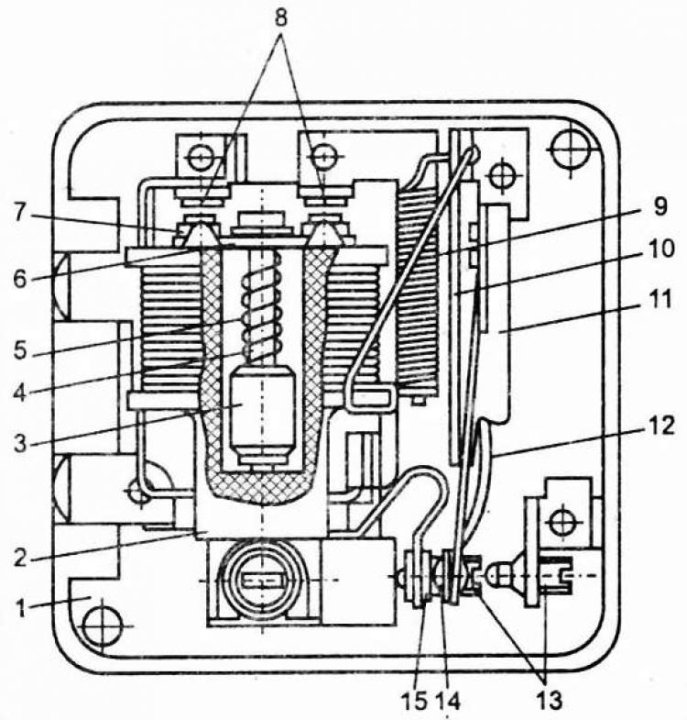 Есть возможность изменить направление вращения, для чего перемычка перекидывается на другую группу контактов.
Есть возможность изменить направление вращения, для чего перемычка перекидывается на другую группу контактов.
Виды моторов для стиральной машины
Для такой детали, как пусковой двигатель, для работы которого нужна электрическая сеть или попросту ток, применение можно найти даже в таком оборудовании, как автонасос.
Для этого можно использовать двигатели от различных стиралок, например:
- Донбасс;
- Рига;
- Ока;
- Nuova;
- Ibmei.
Независимо от того каких годов производства, движок может прослужить еще немало времени при правильной установке. Существует много способов, как можно понизить, или увеличить скорость вращения или понять, почему не работает реле, однако чтобы включить устройство в комплектацию нового оборудования, нужно не только осмотреть рекомендации, но и тщательно отслеживать каждый этап работы.
Подходящие двигатели:
- ДАОЦ У4 со щетками, ДАОА;
- РТК 1ухл4, ухл4, 1у4;
- HXGP1l, 3у4, 3ухл4, 9ухл4.
Особенно часто проводится использование коллекторного движка, так как на его статоре расположен постоянный магнит, способный попеременно подключаться к току с постоянным напряжением. Это своего рода реверс, который позволяет потреблять энергию в небольшом количестве и экономить бюджет. Не менее востребованы двигатели электронного типа, которые обладают электронным блоком управления на корпусе.
Современные двигатели обладают специальным регулятором оборотов, что требуется для контролирования скорости вращения.
Зачем нужна такая деталь? Если движок будет подключаться к бетономешалке или же к вибростанку, потребуется понизить скорость вращения и соответственно направить его на снижение активности функционирования. Излишняя вибрация позволяет провести нужный процесс более качественно.
Для подключения регулятора двигателя из машинки, в которой он был установлен нужно сделать следующее. Он извлекается из полости старой стиралки вместе с радиатором, который является полупроводниковым прибором, за счет которого и осуществляется управление включением и выключением. Далее он впаивается в микросхему реле, заменяя маломощную деталь. Если нет навыков работы с такими процессами, то лучше доверить его настоящему профессионалу, например, компьютерщику. Особенно, если цветная лента тянет и греется.
Далее он впаивается в микросхему реле, заменяя маломощную деталь. Если нет навыков работы с такими процессами, то лучше доверить его настоящему профессионалу, например, компьютерщику. Особенно, если цветная лента тянет и греется.
Как запустить двигатель от стиральной машины
О том, как дать жизнь новому двигателю и сколько потребуется времени, чтобы запустить двухскоростной агрегат уже известно, однако, как осуществить запуск и управление, если есть некоторые неполадки? Вполне возможно и такое, что движок попросту не запустится, даже при том условии, что удалось соединить все правильно. В этом случае нужно проверять нагревание движка, после того как он начнет работать. Достаточно пары минут и если за это время тепло не распространяется на все детали, то требуется определить место скопления нагрева. Это может быть область статора, узла или подшипника.
Основная причина того, что деталь быстро нагревается это:
- Наличие износа или засорения подшипника;
- Сильное увеличение емкости конденсатора, что может иметь только асинхронный двигатель.

После этого проверка проводится каждые 5 минут и достаточно трех раз. Если виной всему подшипник, то нужно разобрать, смазать или заменить, так как бывают моменты, когда он не подлежит восстановлению. Категорически запрещается допускать перегрев двигательной системы, так как это может стать причиной поломки всего нового оборудования и потребовать расходов.
Как подключить мотор от стиральной машины (видео)
Самое важное – это не запустить двигатель, а правильно его подключить и сделать это так, чтобы новое устройство прослужило длительное время без поломок. Если нет навыков работы с такими деталями и тем более с электрооборудованием, то не желательно вовсе проникать в их глубины и стараться смастерить новые изделия.
_I Р0 I красный
Приводной ремень должен иметь длину примерно 600 мм, в противном случае применение режущего инструмента диаметром 200 мм и более окажется невозможным. Некоторые стиральные машины оснащаются именно такими ремнями. В сочетании с режущим инструментом небольшого диаметра, разумеется, можно использовать и ремни меньшей длины.
Некоторые стиральные машины оснащаются именно такими ремнями. В сочетании с режущим инструментом небольшого диаметра, разумеется, можно использовать и ремни меньшей длины.
Штатная схема включения электромотора пилы приведена на рис. 4. Пусковое реле типа РТК-С закрепляют вблизи мотора так, чтобы стрелка на его корпусе была ориентирована вертикально вверх — в противном случае реле не будет правильно срабатывать. Практика показывает, что целесообразнее использовать конденсаторную систему пуска (рис. 5), поскольку отмечено, что при наличии рабочего конденсатора крутящий момент двигателя заметно больше.
Конденсаторная система пуска не требует использования пускового реле. Автоматическое отключение пускового конденсатора производится с помощью доработанного двухклавишного выключателя. Клавиша «Пуск» (рис. 6) снабжается упругим элементом — кусочком поролона либо губчатой резины размером 5x10x20 мм, обеспечивающим возврат клавиши в исходное состояние. Флажок, закрепленный на этой клавише, обеспечивает автоматическое срабатывание второй секции выключателя S2, производящей подачу питания на электродвигатель.
Запуск электродвигателя производится 130
нажатием на клавишу «Пуск» на время, в течение которого электродвигатель выйдет на рабочие обороты. После снятия нажима клавиша «Пуск» упругим элементом возвращается в исходное состояние, размыкая контакты S1, отключающие пусковой конденсатор, в то время как клавиша «Стоп» остается во включенном состоянии, замыкая контакты S2. Остановка электродвигателя производится нажатием на клавишу «Стоп». При использовании конденсаторной системы пуска необходима установка предохранителя на ток порядка 6А.
Для регулировки натяжения ремня гайки стяжных шпилек отпускают и подстолье
Рис. 6. Клавишный выключатель: 1 — флажок; 2 — клавиши; 3 — упругий элемент; 4 — винты крепления
| Пробная схема для запуска двигателя от стиральной машины. После того, как разобрались с выводами обмоток, можно собрать пробную схему для запуска двигателя. |
| Например, в стиральной машинке “Кама – 8М” вся автоматика состоит из реле времени и токового реле. |
| Устройство и принцип работы токового реле: Реле состоит из [1] – подвижного сердечника; [2] – токовой обмотки; [3] – подвижного нормально разомкнутого контакта; [4] – витки из нихрома; [5] – биметаллическая пластинка; [6] – нормально замкнутый контакт; |
| Наглядный пример подключения двигателя от стиральной машины через реле. |
Можно подключить пусковую обмотку через фазосдвигающий конденсатор.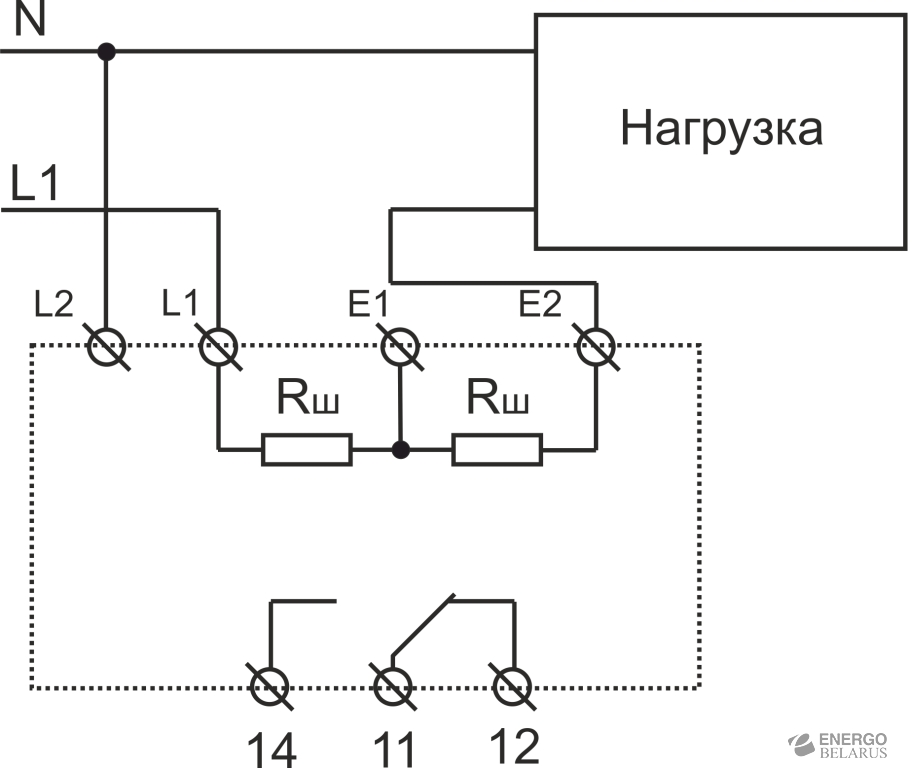 Например для двигателя: 220В, 500 об/мин, ток I = 1,37А требуется конденсатор 6мкФ. Например для двигателя: 220В, 500 об/мин, ток I = 1,37А требуется конденсатор 6мкФ. |
4. Конструкция пускозащитное реле.
Пусковое
реле РП и тепловое защитное реле ТР
смонтированные в одном приборе
(рис. 3). Пускозащитное реле типа РТК-Х
обеспечивают подключение
(на долю секунды) пусковой обмотки ПО
двигателя Д для его запуска
pi
отключения
двигателя при повышенной силе тока в
обмотках.
Катушка пускового реле включена последовательно с рабочей обмоткой двигателя. В катушке свободно перемещается стержень с сердечником. Вверху стержня имеется планка с двумя контактами. Левый неподвижный контакт подключен к пусковой обмотке. В неработающем реле контакты разомкнуты.
Рис.1 График изменения тока при запуске двигателя.
I – ток короткого замыкания рабочей обмотки,
– суммарный ток короткого замыкания рабочей и пусковой обмоток,
– ток рабочей обмотки при работе двигателя на двух обмотках,
IV – ток рабочей обмотки при отключенной пусковой обмотке (рабочий ток).
220 ВРис. 2 Принципиальная схема включения пускозащитного реле.
РО – рабочая обмотка электродвигателя,
ПО – пусковая обмотка электродвигателя,
ПР – пусковое реле; ЗР – защитное реле,
Нэ – нагревательный
элемент.
БП – биметаллическая пластина с контактами.
Рис.3. Электромонтажная схема бытового компрессионного холодильника
При замыкании контакта РТ ток пойдет только через рабочую обмотку РО. Пока ротор двигателя Д неподвижен, сила тока возрастает в 4 – 5 раз (по сравнению с номинальной). Катушка пускового реле РП втягивает (вверх) сердечник и замыкает контакты РП, подключая пусковую обмотку ПО. Ротор раскручивается, сила тока падает, и контакт РП под действием пружины размыкается, отключая пусковую обмотку. –
Токовое
” защитное реле состоит из биметаллической
пластины и нагревателя.
В реле на 127В биметаллическая пластина
соединена одним концом
с проводом катушки пускового реле, а
другим через упор – с бериллиевым
контактодержателем. На противоположном
конце держателя закреплен
подвижный контакт, замкнутый с неподвижным
контактом. В непосредственной
близости от биметаллической пластины
расположена нихромовая
спираль нагревателя, включена
последовательно в цепь пусковой обмотки. Одним концом спираль соединена с
контактом пускового реле, а другим
– с биметаллической пластиной. В РТК-Х
на 220 В имеется второй тепловой
элемент 2ТР, установленный только в цепи
пусковой обмотки. Если ПО
не отключится контактом РП-1, то 2ТР
разомкнет контакт ТР и остановит
компрессор
Одним концом спираль соединена с
контактом пускового реле, а другим
– с биметаллической пластиной. В РТК-Х
на 220 В имеется второй тепловой
элемент 2ТР, установленный только в цепи
пусковой обмотки. Если ПО
не отключится контактом РП-1, то 2ТР
разомкнет контакт ТР и остановит
компрессор
При
включении пусковой обмотки через
защитное реле проходит суммарный
ток обеих обмоток. Однако при нормальном
пусковом токе контакты
реле остаются замкнутыми. Чрезмерная
сила тока в цепи пусковой обмотки
вызывает увеличение количества тепла,
выделяемого нагревателем, и в результате
деформацию биметаллической пластины.
При повышении силы тока в
цепи рабочей обмотки биметаллическая
пластина изгибается под влиянием тепла,
выделяемого при прохождении через нее
тока. В результате деформации пластины
контакт ТР размыкается и отключает
компрессор. После выключения тока
пластина остывает и снова включается
электродвигатель. Если причина увеличения
тока не устранена (‘заклинивание
компрессора, межвитковое замыкание и
др.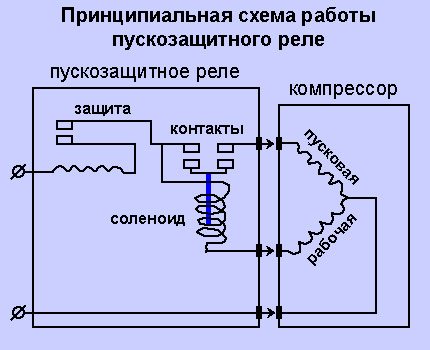 ), реле будет циклично включать и
выключать ток. пока не выйдет
из строя реле или
двигатель.
), реле будет циклично включать и
выключать ток. пока не выйдет
из строя реле или
двигатель.
Here+ RTK GPS — документация к коптеру
В этой статье представлен краткий обзор того, как настроить GPS-приемник Here+ RTK, основанный на Ublox M8P. Как и другие RTK GPS, Here+ может обеспечить гораздо более точную оценку местоположения, чем обычные GPS, но обычно требует использования второго GPS, подключенного к наземной станции. Эти инструкции сосредоточены на настройке с помощью Mission Planner в Windows, но HERE+ также поддерживается QGroundControl.
Где купить
См. список реселлеров Proficnc здесь или вы можете приобрести непосредственно на Proficnc.com.
Установка драйверов
Пользователям Windows 10 (и, возможно, другим пользователям) потребуется загрузить и установить стандартный драйвер u-blox GNSS для Windows версии 1.2.0.8.
Если эта ссылка не работает, вы можете найти более новую версию, доступную в разделе «Драйвер» на этой странице ublox.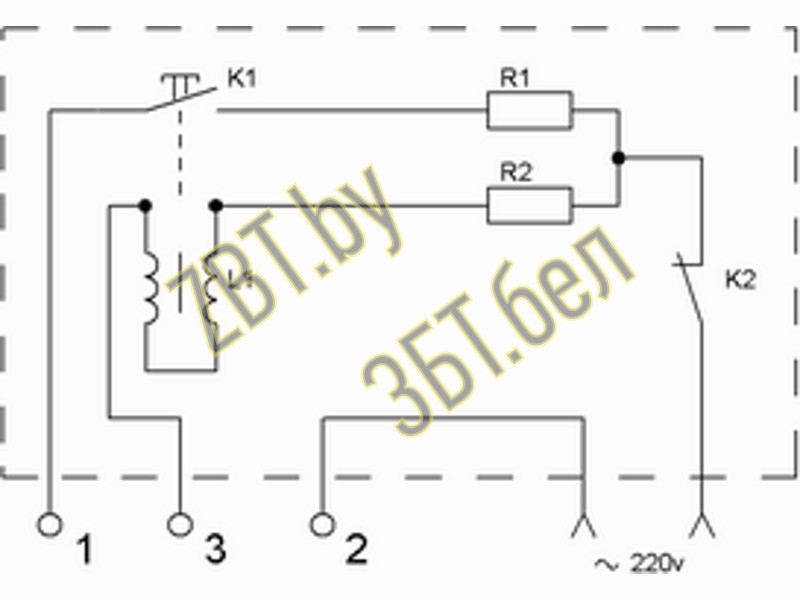
При первой установке устройство может отображаться в категории «датчики» в диспетчере устройств. Если это произойдет, щелкните правой кнопкой мыши по нему и «обновить драйвер». выбирать «Поиск драйверов на моем компьютере» затем выберите «Позвольте мне выбрать из списка устройств» следующий экран покажет список возможных драйверов. Выбирать.. «Последовательное USB-устройство» Выберите «Далее» и завершите.
Если установка выполнена правильно, при подключении GPS должен отображаться в диспетчере устройств как «USB Serial Device».
Обновление до прошивки U-blox 1.30
Версия прошивки модулей HERE+ по умолчанию — прошивка ublox-1.10. Новая версия прошивки 1.30 включает новую функцию объединения других спутниковых систем (Глонасс / beidou) с GPS для операций RTK, что эффективно повышает точность позиционирования RTK. Поэтому всем пользователям рекомендуется обновить прошивку до версии 1.30 перед использованием HERE+.
Во время подготовки этого руководства также была выпущена версия прошивки ublox-1.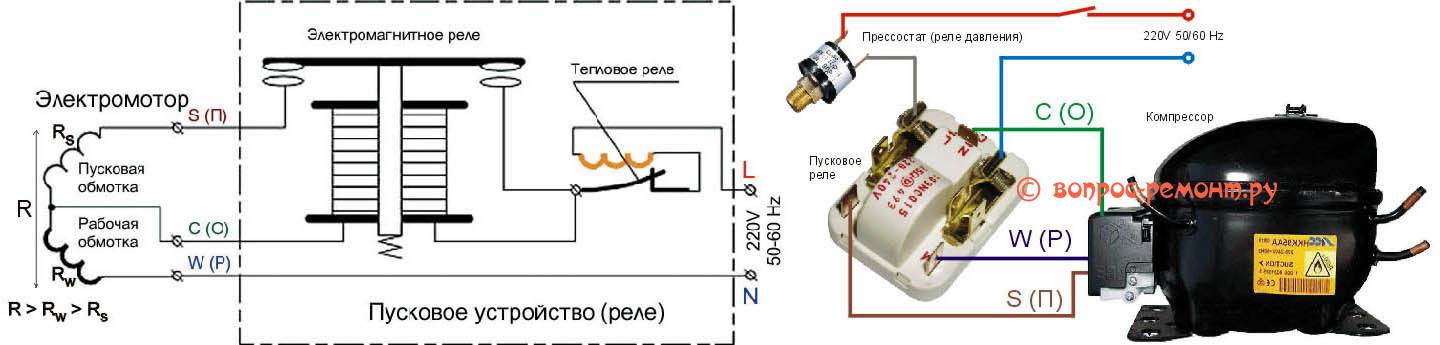 40. Прошивка версии 1.40 представила новую функцию, называемую мобильной базовой станцией, то есть базовую станцию не нужно фиксировать в каком-либо месте. Например, базовая станция может быть размещена на движущемся транспортном средстве или лодке. Обновление до версии Ublox-1.40 аналогично обновлению до версии 1.30. Для пользователей, которым не нужно использовать базовую мобильную функцию, достаточно обновления до версии 1.30.
40. Прошивка версии 1.40 представила новую функцию, называемую мобильной базовой станцией, то есть базовую станцию не нужно фиксировать в каком-либо месте. Например, базовая станция может быть размещена на движущемся транспортном средстве или лодке. Обновление до версии Ublox-1.40 аналогично обновлению до версии 1.30. Для пользователей, которым не нужно использовать базовую мобильную функцию, достаточно обновления до версии 1.30.
Загрузка пользовательского интерфейса U-center и прошивки 1.30
Для обновления прошивки необходимо использовать U-center программного обеспечения Ublox для Windows. Чтобы скачать U-center, перейдите на официальный сайт. Затем следуйте инструкциям по установке программного обеспечения U-cent. В процессе установки вам будет предложено установить драйвер устройства. Убедитесь, что отмечен только стандартный драйвер для Windows, как показано ниже.
Здесь также необходимо скачать прошивку. Выберите вариант: u-blox M8 Flash Firmware 3.01 HPG 1. 30 — ТОЛЬКО для высокоточных продуктов GNSS.
30 — ТОЛЬКО для высокоточных продуктов GNSS.
Подключите базу HERE+ и ровер к компьютеру
При обновлении модуля базовой станции используйте USB-кабель для подключения модуля базовой станции к USB-интерфейсу компьютера, как показано на следующем рисунке:
При обновлении модуля ровера, используйте шестигранную отвертку, чтобы открыть корпус. Модуль ровера имеет разъем интерфейса USB, идентичный базовому модулю. Вы можете использовать USB-кабель базового модуля для подключения ровера к компьютеру. Кроме того, в процессе обновления микропрограммы модуль ровера должен быть запитан путем подключения к автопилоту, как показано на следующем рисунке:
Процесс обновления
Откройте программное обеспечение U-center, нажмите кнопку подключения (как показано в красном кружке), выберите COM-порт, соответствующий модулю вашей базы/ровера.
Нажмите Tools->u-blox 5–8 Flash Firmware Update и выберите настройки, как показано ниже:
В образе прошивки разархивируйте и выберите загруженную прошивку 1. 30. Для базового модуля выберите прошивку с названием: UBX_M8_301_HPG_130_REFERENCE_NEOM8P2.59a07babb501ba6a89ff87cac2f 2765f.bin Для модуля ровера выберите прошивку: UBX_M8_301_HPG_130_ROVER_NEOM8P0.3ee86a9e4775e3335e742b53527fa5 d0.bin
30. Для базового модуля выберите прошивку с названием: UBX_M8_301_HPG_130_REFERENCE_NEOM8P2.59a07babb501ba6a89ff87cac2f 2765f.bin Для модуля ровера выберите прошивку: UBX_M8_301_HPG_130_ROVER_NEOM8P0.3ee86a9e4775e3335e742b53527fa5 d0.bin
В файле информационной структуры флэш-памяти (FIS) выберите Flash.xml, который находится по адресу установки программного обеспечения U-centre.
Нажмите OK и дождитесь завершения загрузки прошивки. Загрузка обычно занимает всего минуту или меньше. Если загрузка прошла успешно, интерфейс обновления отображается зеленым цветом; если обновление прервано, интерфейс отображается красным цветом. Если процесс прерывается или он не отвечает в течение длительного времени, необходимо будет выключить и снова включить модули, а загрузку необходимо выполнить снова.
Проверить текущую версию прошивки ровера/базы
Когда база/ровер уже подключены к U-center, нажмите View, перейдите в Message View -> UBX -> MON _> VER, вы увидите интерфейс ниже:
As Как показано на рисунке, текущая версия прошивки — FWVER = HPG 1. 30 REF, что указывает на то, что текущая версия прошивки — 1.30 для базового модуля.
30 REF, что указывает на то, что текущая версия прошивки — 1.30 для базового модуля.
Базовое руководство по эксплуатации
В этой части руководства в качестве инструкций по эксплуатации используется программное обеспечение наземного управления Mission Planner и микропрограмма управления полетом ArduCopter-3.5.
Подготовка перед операцией.
Для использования HERE+ на БПЛА необходимо следующее оборудование:
Перед использованием убедитесь, что оборудование подключено правильно: Модуль базовой станции подключен к порту компьютера через USB; модуль телеметрии подключен к другому порту USB того же компьютера. Для БПЛА модуль HERE+ровер подключается к разъему GPS автопилота, модуль телеметрии подключается к интерфейсу TELEM.
Разместите автомобиль и базовые станции так, чтобы их GPS-антенны имели прямой обзор неба (т. е. в помещении это не работает!).
Во время работы размещайте базовую станцию на открытом воздухе с достаточным покрытием неба для получения хорошего спутникового сигнала.
Поместите базовую станцию на устойчивую и приподнятую платформу, например на штатив.
 Поместите базовую станцию на устойчивую и приподнятую платформу, например на штатив.
Поместите базовую станцию на устойчивую и приподнятую платформу, например на штатив.Подключение к автопилоту транспортного средства (например, Pixhawk, Cube и т. д.) с помощью Mission Planner
Откройте экран Initial Setup >> Additional Hardware >> RTK GPS Inject
При первой установке в новом месте нажмите кнопку «Ввести базовое положение» и убедитесь, что в диалоговом окне отображается пустая информация о местоположении, как показано ниже:
Настройка базового модуля с помощью Mission Planner
Сначала начните с настройки базового модуля. Во время настройки базовой станции ровер и БПЛА не нужно включать. Откройте программное обеспечение наземной станции Mission Planner на своем компьютере и перейдите на страницу начальной настройки -> Дополнительное оборудование -> RTK/GPS Inject. Вы увидите следующую страницу:
Выберите правильный COM-порт базового модуля в левом верхнем углу и нажмите «Подключиться». В разделе SurveyIn Acc введите абсолютную географическую точность, которую вы ожидаете от базовой станции HERE +. В столбце Время введите минимальное ожидаемое время опроса. Нажмите «Перезагрузить», наземная станция передаст введенные вами данные в базовый модуль HERE +, базовый модуль начнет новый раунд съемки. Вы увидите следующую страницу:
В разделе SurveyIn Acc введите абсолютную географическую точность, которую вы ожидаете от базовой станции HERE +. В столбце Время введите минимальное ожидаемое время опроса. Нажмите «Перезагрузить», наземная станция передаст введенные вами данные в базовый модуль HERE +, базовый модуль начнет новый раунд съемки. Вы увидите следующую страницу:
В процессе опроса в правом поле будет отображаться текущий статус опроса: Позиция недействительна: базовая станция еще не достигла действительного местоположения; In Progress: опрос все еще продолжается; Продолжительность: количество секунд, в течение которых выполнялась текущая задача съемки; Наблюдение: количество полученных наблюдений; Current Acc: Абсолютная географическая точность, которой может достичь текущая базовая станция. Зеленая полоса в нижней части страницы «Планировщик миссий» показывает обнаруженные спутники и мощность сигнала, связанную с каждым спутником.
Базовой станции требуется определенное время, чтобы соответствовать требованиям точности ввода. Тестирование показывает, что на открытой местности без укрытия для достижения абсолютной точности в 2 м требуется несколько минут; для достижения абсолютной точности менее 30 см требуется около часа; для достижения точности 10 см требуется несколько часов.
Тестирование показывает, что на открытой местности без укрытия для достижения абсолютной точности в 2 м требуется несколько минут; для достижения абсолютной точности менее 30 см требуется около часа; для достижения точности 10 см требуется несколько часов.
Примечание
Продолжительность может сильно различаться в зависимости от различных факторов. Например, для достижения абсолютной точности в 2 м может потребоваться час.
Следует отметить, что абсолютная географическая точность базовой станции здесь повлияет на абсолютную географическую точность модуля ровера, не влияя на относительную точность между базовой станцией и ровером. Если ваше приложение не требует БПЛА с высокой абсолютной географической точностью, вам не нужно устанавливать слишком высокую точность базовой станции, что приводит к длительному времени съемки. Даже если точность базовой станции составляет от 1,5 до 2 м, точность позиционирования мобильного модуля относительно базовой станции все равно может достигать сантиметрового уровня.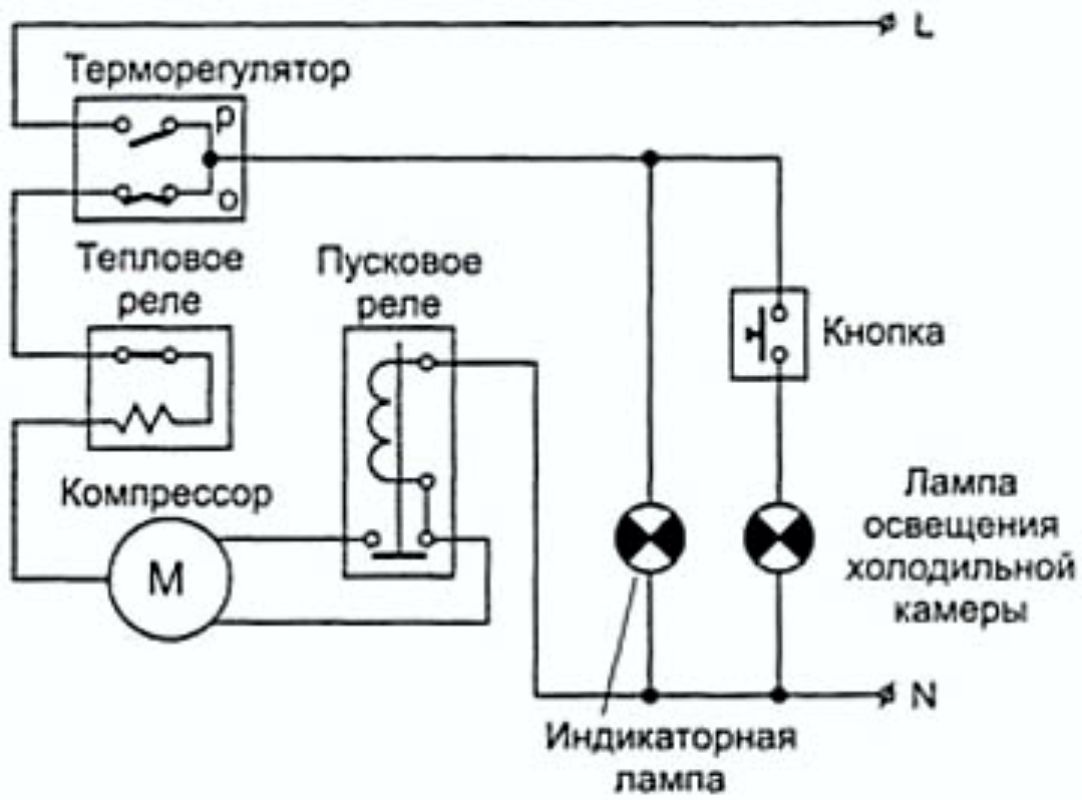
После завершения съемки Планировщик миссий отобразит следующую страницу:
В поле RTCM показано, что индикатор состояния базы зеленый, а спутниковые системы GPS и Глонасс зеленые (если вы хотите изменить спутниковую систему , см. следующий раздел). Поле справа говорит, что Позиция действительна.
Чтобы сохранить текущее местоположение в Планировщике миссий: Нажмите «Сохранить текущую позицию», введите имя в диалоговом окне и нажмите «ОК». Как показано ниже, вы можете увидеть сохраненное местоположение в списке. Нажмите кнопку «Использовать» для сохраненного местоположения. Базовая станция перейдет в фиксированный режим, и в статусе появится сообщение «Используется FixedLLA». В дальнейшем, если вы установите базовую станцию в том же месте, вам не нужно будет проводить опрос повторно, достаточно нажать кнопку Использовать, соответствующую сохраненному вами местоположению.
Модуль вездехода и настройка автопилота
После настройки базовой станции можно включить БПЛА. Используя тот же планировщик миссий для подключения модуля телеметрии, данные базовой станции будут передаваться через модуль телеметрии на модуль HERE + ровер на БПЛА. На главной странице Mission Planner вы можете увидеть текущий статус GPS, отображаемый как RTK Float / RTK Fixed / 3D RTK, что указывает на то, что позиционирование БПЛА перешло в режим RTK. RTK Float — это решение для операций с плавающей запятой; RTK Fixed — это стационарное решение. Фиксированный режим RTK имеет более высокую точность и требует большей мощности сигнала. 3D RTK — это унифицированное выражение RTK Float / RTK в китайской версии Mission Planner.
Используя тот же планировщик миссий для подключения модуля телеметрии, данные базовой станции будут передаваться через модуль телеметрии на модуль HERE + ровер на БПЛА. На главной странице Mission Planner вы можете увидеть текущий статус GPS, отображаемый как RTK Float / RTK Fixed / 3D RTK, что указывает на то, что позиционирование БПЛА перешло в режим RTK. RTK Float — это решение для операций с плавающей запятой; RTK Fixed — это стационарное решение. Фиксированный режим RTK имеет более высокую точность и требует большей мощности сигнала. 3D RTK — это унифицированное выражение RTK Float / RTK в китайской версии Mission Planner.
В поле ввода SurveyIn Acc введите абсолютную точность базовой станции, которую вы хотите получить, в метрах (например, 0,50 означает точность 50 см). В поле ввода Time(s) введите контрольное время в секундах. В зависимости от желаемой точности базовой станции может потребоваться больше времени, чем вы вводите, для достижения желаемой точности.

Строка текста укажет текущий статус съемки: SurveyIn указывает, достигла ли съемка желаемой точности базовой станции, она покажет «истина», когда съемка будет завершена.
InProgress показывает, продолжается ли опрос. Завершенная съемка текущего базового положения отображается сообщениями о состоянии SurveyIn Valid: True и InProgress: false.
Duration: продолжительность съемки в секундах
Obs: количество наблюдений, использованных для съемки
Acc: текущая точность в метрах
нажмите кнопку «Сохранить текущую позицию» и введите имя сохраненной позиции.
Сообщения RTK от базовой станции отправляются на автомобиль с помощью сообщения MAVLink. В главном HUD Mission Planer статус GPS должен отображать RTK Fix или RTK Float
.
Сохраненное положение можно использовать при следующей установке базовой станции в том же месте. Однако, если вы перейдете в другое место для съемки, убедитесь, что вы удалили информацию о местоположении в диалоговом окне, которое появляется, когда вы нажимаете «Ввести базовое положение».
В противном случае при каждом подключении к базовому модулю будет использоваться ранее сохраненная точка.
 В противном случае при каждом подключении к базовому модулю будет использоваться ранее сохраненная точка.
В противном случае при каждом подключении к базовому модулю будет использоваться ранее сохраненная точка.Использование U-центра для записи/воспроизведения данных в режиме реального времени
Одной из функций U-центра является запись данных модуля базы/ровера для последующего анализа. Во-первых, когда модуль базы или ровера уже подключен к U-центру (аналогично тому, как он подключается при обновлении прошивки), щелкните следующий значок ошибки, чтобы включить отладочное сообщение:
Затем щелкните Вид -> сообщение view -> UBX -> RXM -> RTCM (состояние ввода RTCM), щелкните правой кнопкой мыши, чтобы включить сообщение.
Наконец, нажмите на красный значок записи в верхнем левом углу интерфейса (показан ниже), выберите адрес для сохранения записи, нажмите OK, запись начнется. Когда запись остановлена, запись появится по ранее сохраненному адресу.
Чтобы воспроизвести записанные данные, щелкните зеленый значок воспроизведения, выберите скорость воспроизведения, выберите указанный адрес сохраненного файла данных, после чего данные будут воспроизведены.
Использование U-Centre для отладки/расширенной настройки
-Проверить состояние базовой станции. Подключите базовый модуль к программному обеспечению U-center, установите флажок в правом верхнем углу интерфейса, раздел Fix Mode отображается как TIME. Если Fix Mode не переходит в режим TIME, текущего состояния базовой станции недостаточно для того, чтобы мобильный модуль мог войти в режим RTK. Как показано на рисунке ниже, Fix Mode отображается в 3D-режиме, поэтому стандарт RTK еще не достигнут.
Возможные причины того, что базовая станция не входит в режим ВРЕМЕНИ: Во-первых, сигнал, принимаемый базовой станцией, недостаточно силен. Чтобы проверить мощность спутников, принимаемых базовой станцией, см. правый нижний угол интерфейса программного обеспечения. Вертикальные полосы в рамке указывают мощность спутников, принимаемых текущей базовой станцией. Вертикальная полоса обозначает спутник (GPS или Beidou/ГЛОНАСС, в зависимости от выбора спутниковых систем). ВРЕМЯ Режим базовой станции требует: 5 спутниковых сигналов GPS + 2 спутниковых сигнала ГЛОНАСС силой 40 и более; или 5 спутниковых сигналов GPS +3 спутниковых сигнала Beidou силой 40 или более. Как показано на рисунке ниже, сила только одного спутника выше 40, состояние сигнала не соответствует стандарту RTK.
Как показано на рисунке ниже, сила только одного спутника выше 40, состояние сигнала не соответствует стандарту RTK.
Во-вторых, введенные пользователем требования к точности съемки слишком строгие, или базовая станция еще не завершила процесс съемки. Использование U-centre для настройки опроса, пожалуйста, обратитесь к разделу c) в этой главе.
-Проверить, получает ли Ровер данные коррекции базы (тайм-аут). После того, как базовая станция перейдет в режим TIME, необходимо передать данные RTCM на ровер, чтобы ровер перешел в режим RTK. Таким образом, эффективная связь между ровером и базовой станцией в режиме реального времени необходима для хорошей производительности позиционирования RTK.
Проверьте, нет ли задержки в передаче данных между мобильной станцией и базовой станцией, подключите мобильный модуль к U-center (или воспроизведите журнал данных, чтобы проверить предыдущую операцию). Перейдите в представление сообщений -> каталог NMEA -> GxGGA, чтобы просмотреть параметры Age of DGNSS Corr. Этот параметр представляет собой время, когда ровер не получил данные базовой станции. В случае частоты сообщений базовой станции по умолчанию 1 Гц, если этот параметр превышает 1 с, происходит определенная задержка в передаче данных.
Этот параметр представляет собой время, когда ровер не получил данные базовой станции. В случае частоты сообщений базовой станции по умолчанию 1 Гц, если этот параметр превышает 1 с, происходит определенная задержка в передаче данных.
-Установить для базовой станции режим «Съемка в/Фиксированный». Подобно странице Mission Planner RTK Inject, U-center также можно использовать для установки времени и точности съемки базовой станции. Войдите в опцию просмотра сообщений, меню CGF UBX, войдите на вкладку TMODE3. Выберите 1.Survey-in в раскрывающемся списке Mode и установите время опроса (и минимальное время, необходимое базовой станции для опроса). Текущий статус опроса можно просмотреть на странице NAV-> SVIN в режиме просмотра сообщений.
Базовая станция также может быть установлена в фиксированный режим. Когда известны текущие точные географические координаты базовой станции, координаты могут быть введены непосредственно в базовую станцию, что экономит время, необходимое для съемки.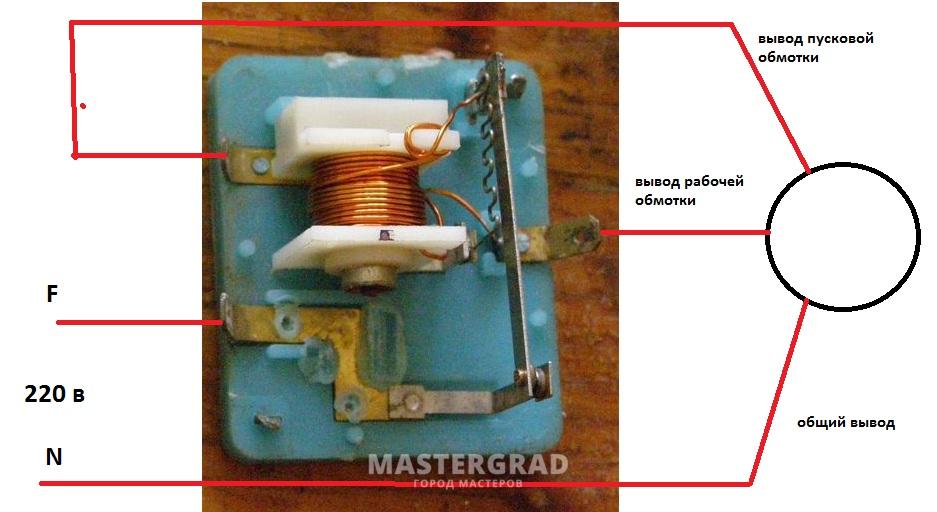 На странице TMODE3 выберите в раскрывающемся списке Фиксированный режим, а затем введите точные известные координаты базовой станции.
На странице TMODE3 выберите в раскрывающемся списке Фиксированный режим, а затем введите точные известные координаты базовой станции.
После установки режима съемки или фиксированного режима нажмите кнопку «Отправить» в левом нижнем углу страницы, чтобы передать измененные данные на базовую станцию.
– Используйте Beidou/Глонасс. Прошивка uBlox 1.30 по умолчанию использует навигационную систему GPS + ГЛОНАСС для служб определения местоположения. Если вы хотите перейти на навигационную систему GPS + Beidou, вам необходимо войти в представление «Сообщения» -> «UBX» -> «CGF» -> «Каталог GNSS», снять отметку с опции «Включить ГЛОНАСС», а затем установить флажок «Включить Beidou». После выбора нажмите «Отправить», чтобы завершить изменение.
Чтобы сохранить текущие настройки, перейдите на страницу «Сообщения» -> «UBX» -> «CFG (Конфигурация)» и нажмите «Сохранить текущую конфигурацию», затем нажмите «Отправить» (как показано ниже).
Примечание
Базовая станция и мобильный приемник должны использовать одинаковую конфигурацию навигационной системы, иначе мобильный приемник не сможет войти в режимы RTK.
– Порт ввода/вывода базового модуля и настройка протокола. Чип UBlox M8P поддерживает множество протоколов ввода и вывода, включая USB, UART, I2C и так далее. Модуль базовой станции HERE+ использует порт USB для передачи данных и выходов RTK. Если вам нужно подтвердить текущие настройки, перейдите в представление Messages -> UBX -> CFG -> Каталог PRT и выберите 3-USB в поле Target. Правильные протоколы ввода и вывода показаны ниже:
Если вы хотите использовать больше протоколов вывода (например, UART), вы также можете выбрать протокол вывода и определенную комбинацию сообщений на этой странице. Если вы хотите установить строку определенных сообщений для вывода по различным протоколам, вы можете перейти в представление «Сообщения» -> каталог UBX -> CGF -> MSG, выбрать конкретное сообщение, а затем проверить тип протокола, который вы хотите для вывода.
Чтобы сохранить текущие настройки, перейдите на страницу Сообщения -> UBX -> CFG (Конфигурация) и щелкните параметр Сохранить текущую конфигурацию, затем нажмите Отправить.
-Изменить выходную скорость модуля вездехода. По умолчанию выходная частота информации о местоположении мобильного модуля составляет 1 Гц. Если вам нужно ускорить частоту вывода позиции, вы можете войти в представление Сообщения -> UBX -> CGF -> каталог RATE, изменить Период измерения. Например, период измерения изменен на 200 мс, а частота измерения увеличена до 5 Гц.
Чтобы сохранить текущие настройки, перейдите на страницу Сообщения -> UBX -> CFG (Конфигурация) и щелкните параметр Сохранить текущую конфигурацию, затем нажмите Отправить.
Замена базовой антенны и тестирование
ЗДЕСЬ + антенна базового модуля представляет собой антенну Taoglass. Пользователи могут выбирать различные антенны в соответствии со своими потребностями и подключать их к базовому модулю. Мы провели тест трех разных антенн на открытом воздухе, где три антенны одновременно в одном и том же месте были подключены к базовой станции HERE +, данные записывались с использованием функции записи Ucentre. Следует отметить, что следующих данных недостаточно, чтобы сделать исчерпывающий вывод о том, какая антенна лучше, но пользователь может использовать следующие методы для тестирования, сравнения различных антенн, чтобы найти более подходящую для своего применения.
Следует отметить, что следующих данных недостаточно, чтобы сделать исчерпывающий вывод о том, какая антенна лучше, но пользователь может использовать следующие методы для тестирования, сравнения различных антенн, чтобы найти более подходящую для своего применения.
Тестовая антенна A:
Тестовая антенна B:
Исходная антенна:
Состояние базы с антенной A в режиме TIME:
Состояние базы с антенной B в режиме TIME:
Состояние базы с исходной антенной в режиме TIME:
Сравнение спутникового сигнала для каждого спутника:
Количество принимаемых спутников более 40 с антенной A: 12 спутников
Количество принимаемых спутников более 40 с антенной B: 13 спутников
Количество принимаемых спутников более 40 с оригинальной антенной: 14 спутники
330 Monster – Электрическая установка – Мастерская ReP_AL Maker
Ниже подробно описаны шаги по сборке главной электрической платы, расположенной под основным кожухом газонокосилки, а также способы подключения других датчиков и драйверов косилки. Пожалуйста, внимательно следуйте инструкциям, и вы создадите аккуратную плату для газонокосилки. Эта плата управления может быть установлена вне газонокосилки. После того, как доска будет готова, вы можете прикрутить ее к точкам крепления внутри капота газонокосилки.
Пожалуйста, внимательно следуйте инструкциям, и вы создадите аккуратную плату для газонокосилки. Эта плата управления может быть установлена вне газонокосилки. После того, как доска будет готова, вы можете прикрутить ее к точкам крепления внутри капота газонокосилки.
Расположите компоненты, как показано на схеме ниже. Припаяйте черный провод (отрицательный) и красный провод (положительный) к преобразователю постоянного тока на входной стороне. Это подаст питание 12 В на преобразователь постоянного тока. Убедитесь, что кабели имеют длину не менее 20 см.
Поворотом регулировочного винта против часовой стрелки входное напряжение 12 В можно преобразовать в выходное напряжение 5 В. С помощью вольтметра измерьте выходное напряжение и отрегулируйте его до 5 В.
Этот выход 5 В будет питать большинство плат и датчиков газонокосилки. Добавьте 2 отрезка кабеля к выходу 5V. Мы соберем все линии электропередач 5В в показанной области.
Используя отдельный положительный и отрицательный кабель, подайте питание 5 В на Arduino MEGA.
Подключите часы реального времени и NodeMCU к источнику питания 5 В. Положительный и отрицательный кабели можно проложить под MEGA, чтобы установка выглядела как можно более чистой. Проложите сигнальные провода от контактов, показанных на RTC и NodeMCU, к MEGA. Я действительно считаю, что лучше всего припаять провода, так как со временем контакты проводов Arduino могут отсоединиться.
Снова подайте питание 5 В на реле и подключите сигнальный контакт к MEGA.
Поскольку вы используете силовые двигатели, соедините два драйвера двигателей, как показано здесь.
Мосты двигателя не требуют источника питания 5 В. Подсоедините сигнальные провода к MEGA, как показано на схеме ниже.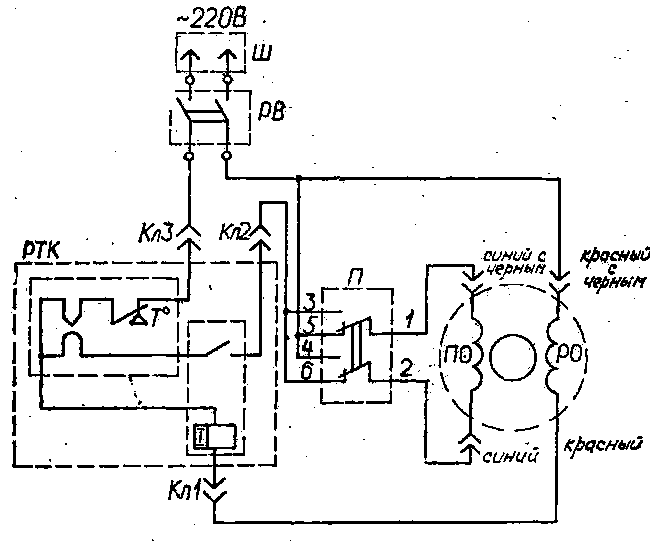
Чтобы подготовить драйвер двигателя к питанию 12 В, соедините контакты 12 В и GND драйверов двигателя, используя более толстый силиконовый провод толщиной не менее 1,5 мм.
Подключите датчик напряжения к источнику питания 5 В, а сигнальный контакт к контакту Arduion Nano A2
9000 3
Подключите датчик усилителя к источнику питания 5 В, а сигнальный контакт к Arduion. Контакт Nano A1
Подключите Arduino Nano к источнику питания 5 В, а контакты последовательной связи к Arduino MEGA. Подготовьте провод 5V (плюс и GND) для датчика дождя, который мы подключим позже. Также подготовьте сигнальный провод от контакта A3 Arduino Nano для датчика дождя.
Компас будет работать от 3,3 В и требует связи SCA SCL. Подготовьте эти провода для компаса. Провода должны быть достаточно длинными, чтобы добраться до модуля компаса, который будет расположен в передней части газонокосилки.
Сенсорный TFT-экран взаимодействует с MEGA через последовательную связь. Позже в сборке мы добавим линию питания 5 В в нижнюю часть косилки, где мы сможем подключить TFT-экран к источнику питания. 2 линии данных последовательной связи требуются достаточно долго, чтобы достичь TFT-экрана.
Питание 12 В для двигателей колес и двигателя ножа включается и выключается через реле. Питание 12В поступает в цепь реле (СОМ) от аккумуляторного источника. Положительный провод 12 В затем выходит из реле с НО (нормально разомкнутая сторона), одна линия питания к приводам двигателя колеса и одна линия питания к контроллеру двигателя отвала.
Отрицательный кабель 12 В подключается к клемме GND контроллера мотора. (на шаге 7 мы соединили оба контроллера вместе, так что теперь оба контроллера будут получать питание.)
Подключите охлаждающий вентилятор 12 В к контактам 12 В и GND на одном из контроллеров двигателя колеса.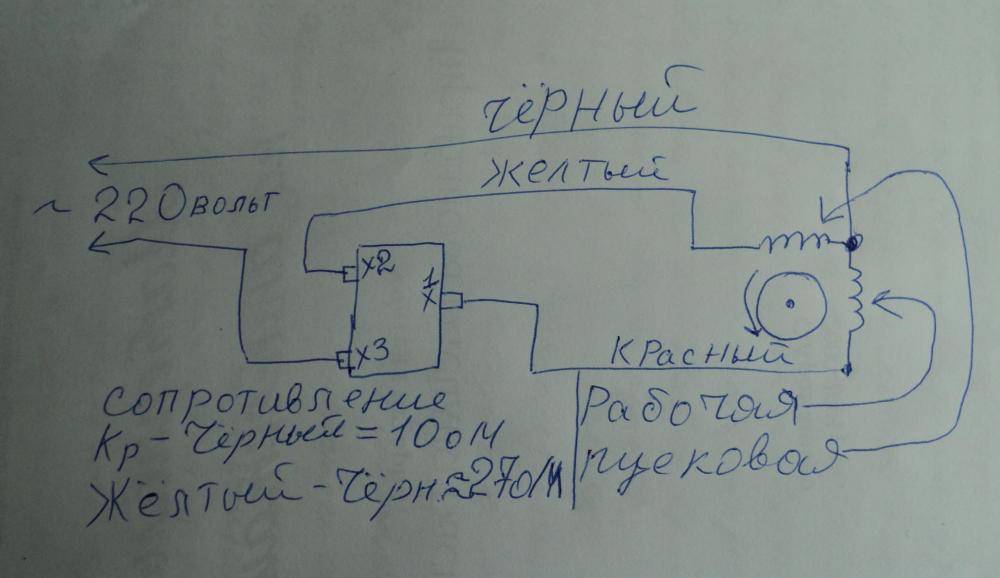 (Вентилятор включается при срабатывании реле). Добавьте по 2 провода на привод колесных двигателей достаточной длины, чтобы дотянуться до колесных двигателей в задней части газонокосилки.
(Вентилятор включается при срабатывании реле). Добавьте по 2 провода на привод колесных двигателей достаточной длины, чтобы дотянуться до колесных двигателей в задней части газонокосилки.
На следующих этапах мы подключим датчики из нижней части косилки к MEGA. На этой диаграмме показано, какие провода мы будем подключать, и их пути. А пока просто добавьте провода 5V+ и GND, как показано, которые мы можем использовать для питания датчиков в нижней части косилки.
Теперь сборка должна выглядеть так и иметь следующие провода для подключения других датчиков/двигателей и т. д. в газонокосилке. Электрощит теперь можно установить в вытяжку с помощью точек крепления.
Электрощит должен быть установлен в кожухе косилки. Теперь пришло время подключить другие датчики и создать полную цепь 12 В.
Сгруппируйте линии 12 В и закрепите их с помощью вилки электрического разъема. Сделайте то же самое с проводами колесного двигателя и цепью 5 В для нижней части косилки.
Сделайте то же самое с проводами колесного двигателя и цепью 5 В для нижней части косилки.
Установите модуль компаса и датчик дождя, используя предварительно подготовленные провода из предыдущих шагов.
Подсоедините двигатели колес к предварительно подготовленным линиям двигателей колес. Если используются соединительные блоки, провода двигателя колеса можно легко переключить, чтобы обеспечить правильную работу вперед, назад, влево и вправо.
Если левый двигатель вращается вместо правого, поменяйте местами оба провода двигателя на двигателе с другими проводами двигателя.
Если правильный двигатель вращается, но в неправильном направлении, просто поменяйте местами 2 провода, которые уже находятся на двигателе, друг с другом.
Подготовьте TFT Arduino MEGA (отдельный MEGA) с 5 В, заземлением и двумя последовательными кабельными соединениями RX1 TX1.
Наденьте TFT Shield на MEGA, убедившись, что штифты совмещены правильно. Скопируйте файлы BMP из папки ARDUINO Code на карту micro SD и вставьте ее в экран TFT 9.0003
Используйте пластину TFT, напечатанную на 3D-принтере, и зажим, чтобы надежно удерживать экран TFT и установить его в косилку.
Подключите 5V и GND от TFT к выходу 5V, созданному для нижней части косилки. Затем подключите RX3 -> TX1 и TX3 -> RX1, чтобы обеспечить связь между TFT Shield и основной косилкой Arduino MEGA.
Подсоедините предварительно подготовленный источник питания 12 В от реле к контроллеру двигателя лезвия, как показано на схеме. Затем подключите провод GND 12 В к точке подключения GND на цепи 12 В.
Теперь подключите блейд-контроллер к основной плате Arduino MEGA, чтобы Ardunio MEGA мог управлять контроллером блейд-двигателя.
3 провода связи идут к Arduino MEGA . Провода VCC и GND подключаются к нижней точке выхода 5V.
Провода VCC и GND подключаются к нижней точке выхода 5V.
Проводной датчик подготовлен, как показано на следующей схеме. Конденсатор на 200-кратном усилителе звука следует шунтировать, припаяв 2 контакта на нижней стороне платы.
Затем проводной датчик подключается к цепи, используя снова нижний выход 5 В, как показано ниже. Сигнальный провод подключается к контакту A5 Arduino MEGA.
Основная литий-ионная батарея 12 В подключена к цепи 12 В, как показано ниже. Главный выключатель питания отключает питание всех компонентов после выключения. Положительный провод от цепи 12 В проходит к датчику напряжения для измерения напряжения аккумулятора газонокосилки.